Flight Test with miniature PIBOT
Flight Simulation with Human-size PIBOT
Publications
M.S. Thesis: Design of Pilot Robot and Its Control Algorithm, 2016. (advised by David H. Shim) [pdf] [video]
[C-2] H. Song, H. Shin, H. You, J. Hong, and D. H. Shim, “Toward Autonomous Aircraft Piloting by a Humanoid Robot: Hardware and Control Algorithm Design,” in 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems, Daejeon, Republic of Korea, Oct. 2016. [pdf] [video]
[C-3] H. Song, H. Shin, H. You, and D. H. Shim, “A Study on Autonomous Flight Control System for a Fixed-wing Aircraft using a Pilot Robot,” in 2015 The Korean Society for Aeronautical and Space Sciences Fall Conference, Jeju, Republic of Korea, Nov. 2015. [pdf] [video]
[J-3] H. Song, D. Lee, and D. H. Shim, “Development of a UAV using a humanoid robot,” Journal of Institute of Control, Robotics, and Systems, vol. 20, Nov. 2014, pp. 1112-1117. [pdf] [video]
Miniature PIBOT
Flight experiment is designed and conducted with a model aircraft piloted by a miniature PIBOT to verify the feasibility of humanoid robot operation of an aircraft.
Hardware - RC Aircraft

Wing span: 1800 mm, Length:2030 mm, Weight: 12kg
Power: 10400mAh, 37V, 40C, Max. 15min
Hardware - Avionics


FCC: Gumstix Verdex Pro XL6P (600Mhz, ARMv5, 256MB)
IMU, GPS: Microstrain 3DM-GX3-35
Hardware - Manipulator

DOF: 3 DOF for each arm
Actuator: ROBOTIS Dynamixel AX-12A
Hardware - Setting


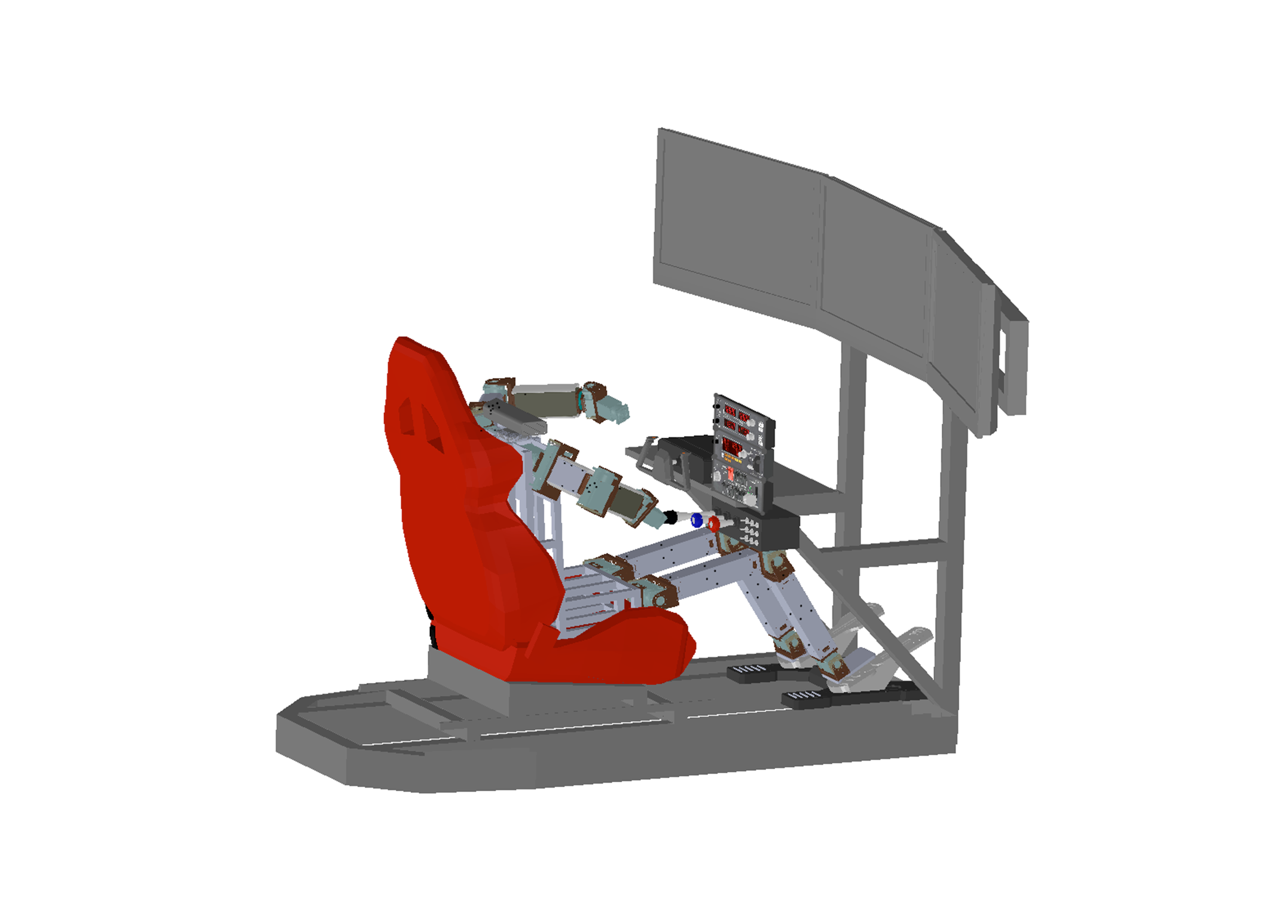
Human-size PIBOT
Flight simulation is designed and conducted with a flight motion simulator piloted by a human-size PIBOT to verify the feasibility of humanoid robot operation of an aircraft.
Hardware - Design


Specifications

PIBOT + 4 DOF Flight Motion Simulator
Software - Cockpit Configuration

Software - Architecture

Flight Simulation Result
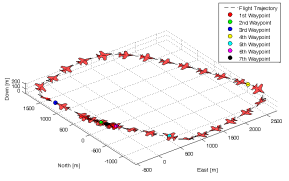
Flight Trajectory

Attitude Control Result

Control Output

Altitude and Velocity Control Result