Publication
[T-1] Ph.D. Dissertation: Shared Control Based on Predictability Analysis With Application to Human-SuperLimb Collaboration, MIT, 2023. [pdf] [video]
[J-1] H. Song, H. Asada, "Lipschitz Analysis of Bimanual Task Data for Constructing a Supernumerary Robotic Limb to Assist a Human," in International Journal of Robotics Research (IJRR), 2025. (under review)
[J-2] H. Song, H. Asada, “Shared Control Based on Extended Lipschitz Analysis With Application to Human-Superlimb Collaboration,” arXiv:2309.00685 [cs.RO], 2023. [arXiv]
[J-3] H. Song, H. Asada, "Integrated Voluntary-Reactive Control of a Human-SuperLimb Hybrid System for Hemiplegic Patient Support," in IEEE Robotics and Automation Letters (RA-L), vol. 6, no. 2, pp. 1646-1653, April 2021. ICRA Best Paper in Medical Robotics Finalist [pdf][video1][video2]
[J-4] J. Guggenheim, R. Hoffman, H. Song, H. Asada, "Leveraging the Human Operator in the Design and Control of Supernumerary Robotic Limbs," in IEEE Robotics and Automation Letters (RA-L), vol. 5, no. 2, pp. 2177–2184, April 2020. [pdf][video1][video2][video3]
Summary
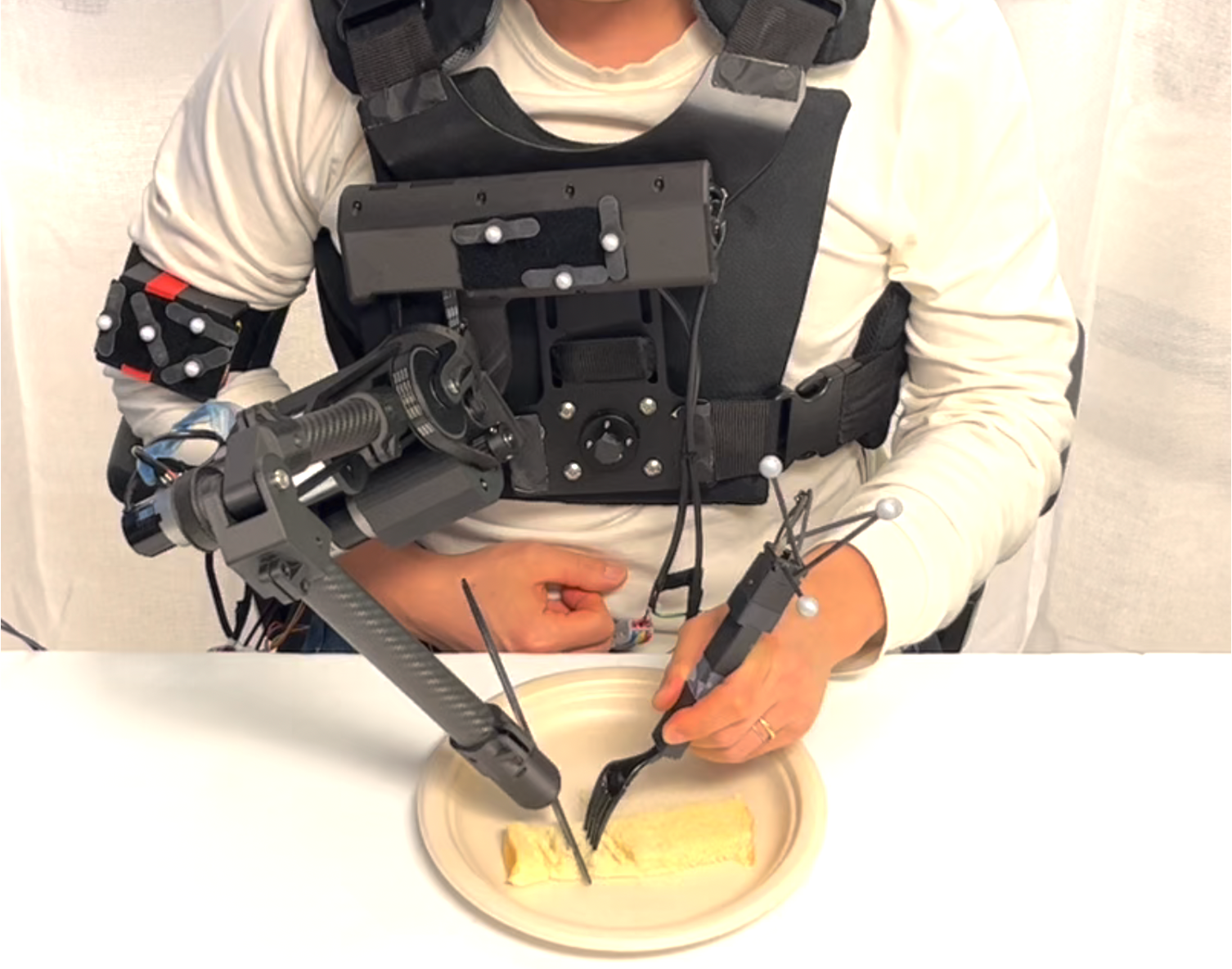
This PhD project presents data-driven, quantitative methodologies based on predictability analysis—leveraging Lipschitz data analysis—to develop shared control in human-robot collaboration. The methods are applied to assist hemiplegic patients in a bimanual eating task (i.e., eating with a fork and knife) using a Supernumerary Robotic Limb, or SuperLimb for short. The core idea is to assign highly predictable situations to the robot’s autonomy—driven by imitation learning—and low-predictability situations to human intervention or manual control. Furthermore, the study proposes a method to improve predictability by identifying useful, unobservable information through a Hidden Markov Model (HMM).